
Для бортового оборудования гибридной системы автоматической посадки MLS + VBLS базовой платформой является посадочный автопилот «DinaPrim 2700», разработанный ООО «Примариа». Структура посадочного автопилота с дополнительным сенсором — приемником MLS показана на блок — диаграмме. Структура показывает основные компоненты посадочного автопилота, который в конечном счете выдает команды управления на основной автопилот БПЛА. Посадочный автопилот может также самостоятельно управлять исполнительными сервоприводами БПЛА.
Сенсоры
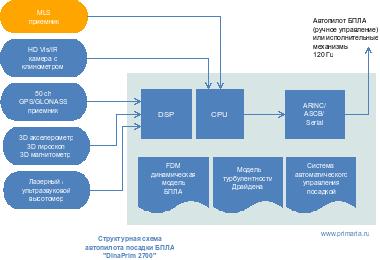 Посадочный автопилот использует различные источники информации — сенсоры. Основные сенсоры это камера и опционально MLS приемник. Для оценки положения БПЛА на этапе посадки и воздействия турбулентности автопилот использует данные 3D гироскопа, акселерометра и магнитометра. Для выхода на глиссаду используется 50 — канальный приемник GPS/GLONASS.
Посадочный автопилот использует различные источники информации — сенсоры. Основные сенсоры это камера и опционально MLS приемник. Для оценки положения БПЛА на этапе посадки и воздействия турбулентности автопилот использует данные 3D гироскопа, акселерометра и магнитометра. Для выхода на глиссаду используется 50 — канальный приемник GPS/GLONASS.
На этапе посадки в условиях турбулентности критичным является контроль высоты полета БПЛА. Данные о высоте формируются с помощью двух дополняющих друг друга сенсоров: лазерного и ультразвукового дальномеров. Оба сенсора имеют разрешающую способность 1 см. Лазерный дальномер используется на высотах с 50м и менее, на высоте 7,65м используется ультразвуковой дальномер. Для подсистемы измерения дальности важным является скорость обновления информации. Для лазерного дальномера она составляет 32 значения в секунду, для ультразвукового — 40 значений в секунду.
Информация с 3D датчиков и сенсоров высоты обрабатывается в процессоре реального времени — DSP. Данные с камеры и приемника MLS обрабатываются во встраиваемом процессоре, который использует аппаратную поддержку кодеков для обработки видео в реальном времени.
Управляющие воздействия на исполнительные механизмы БПЛА во время посадки могут выдаваться как через собственный автопилот БПЛА, так и напрямую к сервоприводам исполнительных механизмов.
Программное обеспечение
ПО посадочного автопилота «DinaPrim 2700» состоит из трех блоков.
Блок FDM представляет собой динамическую модель БПЛА — Flight Dynamics Model, FDM и входит в состав встраиваемого ПО посадочного автопилота только опосредованно — через адаптационные параметры, или данные и коэффициенты соответствующие данному типу БПЛА. FDM предоставляет возможность для симуляции процесса посадки данного типа БПЛА с учетом турбулентности для точной настройки параметров модели.
Блок моделирования турбулентности использует модель турбулентности Драйдена для определения оптимального захода на посадку и статистической минимизации нежелательных «провалов» БПЛА по вертикали. Модель турбулентности Драйдена (Dryden Model of Turbulence) формализована в ряде документов, в частности, в MIL-F-8785C. Данный блок ПО работает в реальном времени и представляет собой адаптивный фильтр с предсказанием, который позволяет выполнить опережающее регулирование положения БПЛА в процессе посадки в условиях турбулентности и сдвига ветра.
Здесь целесообразно еще раз отметить, что в отличие от традиционной авиации БПЛА сильно подвержены влиянию турбулентности при посадке и учет этого фактора является принципиальным.
Блок управления ПО автопилота — это собственно система автоматического регулирования, которая использует адаптационные параметры FDM, адаптивный фильтр Драйдена и данные сенсоров для выдачи оптимальных управляющих воздействий.
Как отмечалось выше, весь процесс посадки может быть промоделирован в FDM с учетом самых различных условий. При предоставлении заказчиком данных по своему типу БПЛА, ему будут предоставлены результаты моделирования.
Этапы посадки
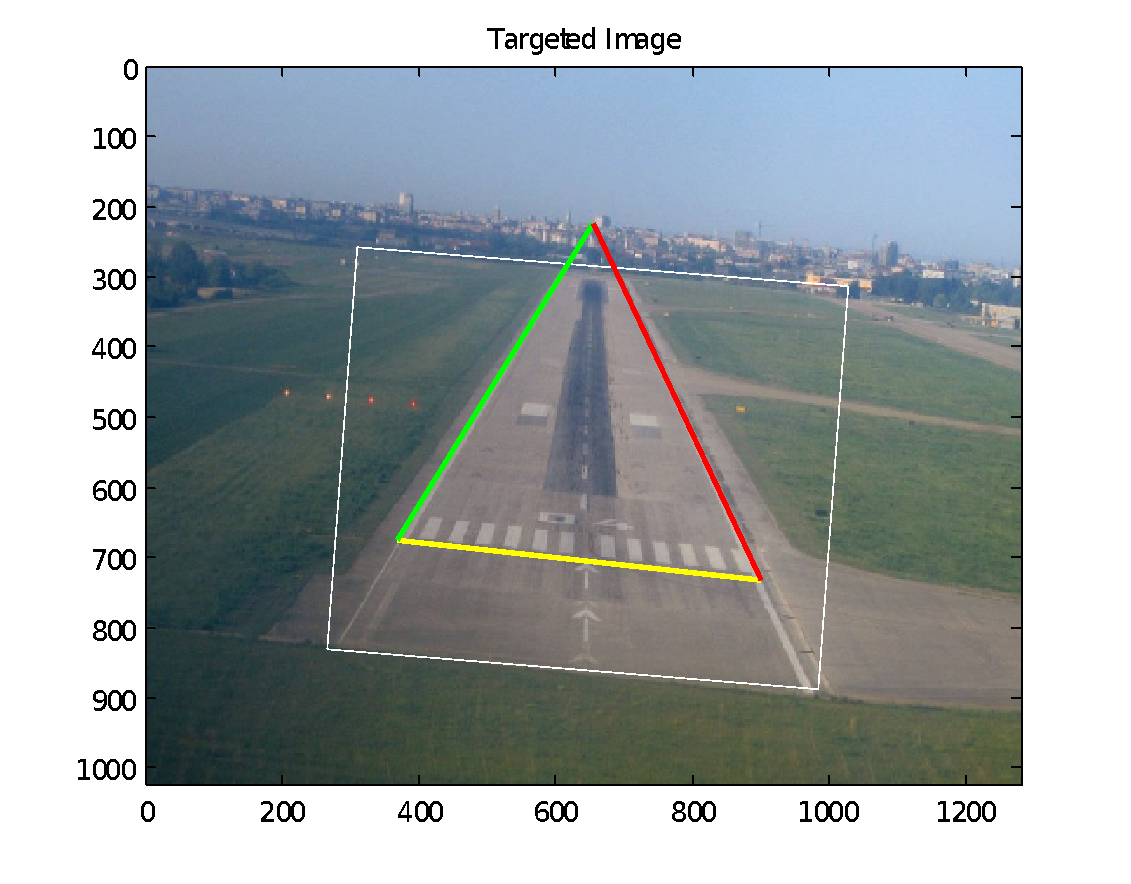
Во время посадки автопилот проходит через несколько последовательных режимов. В каждом из режимов формируются изображения, полученные в процессе работы автопилота, с наложенными маркерами опознавания, которые формируются в реальном времени.
Подход

На данном этапе используется навигация GPS/GLONASS для выхода на глиссаду и выравнивания БПЛА вдоль ВПП. Данные спутниковой навигации используются для управления беспилотным аппаратом таким образом, чтобы обнаружить ВПП. Предполагаемая сигнатура ВПП опознается автопилотом и далее, по мере приближения к ВПП, оценивается достоверность опознавания. Если изображение идентифицировано, то далее выполняется захват и сопровождение ВПП.
Захват
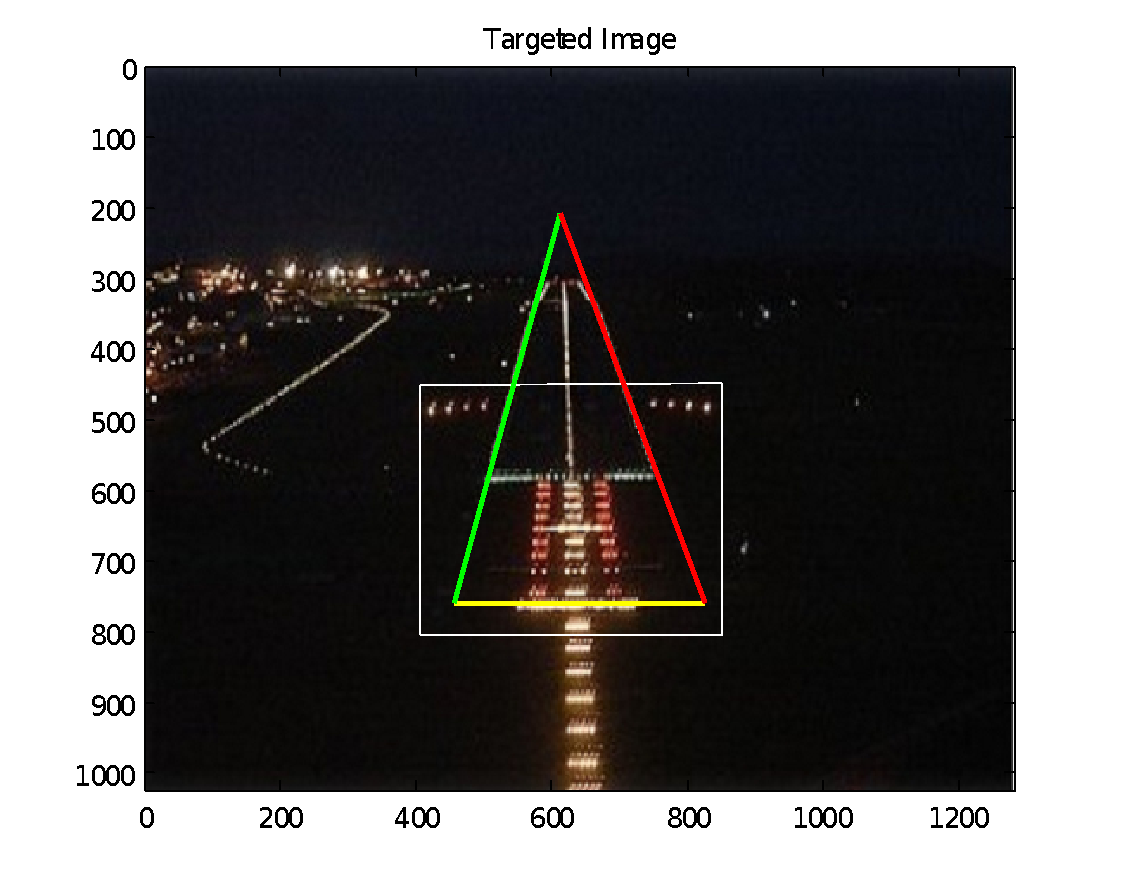 Посадочный автопилот, используя изображение с камеры параллельно с данными GPS/GLONAS, ведет непрерывный анализ и опознавание видеосигнала для поиска характерных точек ВПП. При этом используется также информация с остальных сенсоров для стабилизации БПЛА в необходимом посадочном положении.
Посадочный автопилот, используя изображение с камеры параллельно с данными GPS/GLONAS, ведет непрерывный анализ и опознавание видеосигнала для поиска характерных точек ВПП. При этом используется также информация с остальных сенсоров для стабилизации БПЛА в необходимом посадочном положении.
После опознавания взлетно — посадочная полоса обозначается маркерами.
Удержание и сопровождение
С этого момента ВПП считается идентифицированной и ее характерные точки позволяют определить взаимное пространственное положение БПЛА и ВПП.
Поступающая информация непрерывно анализируется на предмет надежности и непротиворечивости. Производится непрерывное удержание изображение ВПП. Частота формируемых посадочным автопилотом данных увеличивается до 120 Гц.
Выравнивание и касание
На этом этапе контролируется высота БПЛА над ВПП с точностью 20 см, а также скорость и положение, вплоть до касания.
Характеристики и параметры
Распознавание изображений ВПП, полученных с камеры, основывается следующих характерных точках ВПП и посадочных огнях:
- PAPI (Precision Approach Path Indicator) индикаторы, если полоса оборудована ими;
- посадочные огни;
- перемещенный порог и торец ВПП;
- осевая линия ВПП и зона приземления ВПП.
Посадочный автопилот «DinaPrim 2700» использует два изображения ВПП, снятых с близкой дистанции в дневное и ночное время. Он также может использовать данные геодезической привязки места посадки в соответствии с полетным планом БПЛА.
При доступности информации о координатах посадочных огней, направлении ВПП и ее высоты эта информация также сохраняется в базе данных автопилота.
Посадочный автопилот в процессе работы в режиме реального времени вычисляет следующие параметры с заданной погрешностью:
- Угол наклона глиссады: 0 — 10 град, погрешность 0.08 град;
- Погрешность оценки времени до касания ВПП: 0,5 сек;
- Высота БПЛА над ВПП: 0 — 18 м, погрешность: 0.2 м (в момент касания);
- Расстояние до торца ВПП: 0 — 3.5 Nm, погрешность: 2.5 м;
- Углы крена, тангажа и рыскания: -90..90 град, погрешность: 1.0 град;
- Темп обновления информации: до 120 Гц;
- Частота формируемых изображений с маркерами: 10 Гц;
- Максимальная скорость БПЛА: 2100 км/ч;
- Максимально измеряемая перегрузка: 4 g.
Выход посадочного автопилота может быть адаптирован к любому интерфейсу управления БПЛА. Время отклика системы, связанные с высокой скоростью вычисления и обновления данных (120 Гц) позволяет обеспечить быструю реакцию на внезапно возникающие события, такие как порывы ветра, на финальной стадии приземления БПЛА.
Моделирование процесса автоматической посадки
Процесс посадки под управлением посадочного автопилота «DinaPrim 2700» моделировался в сравнении с ILS. При моделировании применялся метод Монте — Карло с использованием параметров самолета Cessna-172. Целью моделирование было получение параметров системы в сравнении со посадочным де-факто мировым стандартом, которым является сертифицированная система ILS.
Модель основана на соотношениях, описывающих поведение самолета как динамического объекта и уравнениях турбулентности так, как они описаны в международных стандартах ICAO/FAA, подразумевающих присутствие системы посадкиILS категории Cat II, с погрешностями ILS оговоренных в документе ICAO, Приложение 10, Том. I, Раздел 3.
В модель были включены типовые функции стандартного автопилота воздушного судна, такие как:
- автоматическое управление в контуре с обратной связью с поддержанием углов рыскания, крена и тангажа;
- базовые функции на маршруте, контроль высоты и скорости;
- функции автоматической посадки.
Основные параметры модели были заданы в соответствии со следующими значениями:
- расстояние до точки приземления: 12200 м;
- начальный диапазон высот полета: 584 — 784 м;
- начальное отклонение (по отношению к осям ВПП) : -200..200 м;
- расположение зоны турбулентности по высоте по отношению к точке приземления: от 9000 м до 400 м;
- интенсивность турбулентности: 7 — 15 м/с;
- угол наклона глиссады: 3°.
Для проведения корректного статистического анализа, моделирование для системы «DinaPrim 2700» и ILS проводилось в условиях одинаковых данных турбулентности. В результате были получены следующие статистические данные, отражающие интервал наблюдения и вероятность попадания в данный интервал (в процентах):
- Продольное положение (Ntouch): -60..60 м, 95 %;
- Поперечное положение: (Etouch): -6..6 м, 95 %;
- Максимальная вертикальная скорость для мягкой посадки: 1.82 м/с;
- Максимальная вертикальная скорость для жесткой посадки: 3.04 м/с;
- Максимальная вертикальная скорость для аварийной посадки: 3.04 м/с;
- Угол рыскания в момент касания (φtouch): -5..5 град, 95 %;
- Угол крена в момент касания (θtouch): 3-15 град, 95 %;
- Угол рыскания в момент касания (ψtouch): -5..5 град, 95 %;
- Максимальное значение перегрузки (ntouch): 1.7 g, 95 %.
В результате сопоставления результатов, полученных при моделировании посадки с использованием «DinaPrim 2700» и ILS, с интенсивностью турбулентности 10 м/с, алгоритм демонстрирует соответствие условиям посадки ILS CAT II, во значением процента мягких посадок БПЛА 97% .
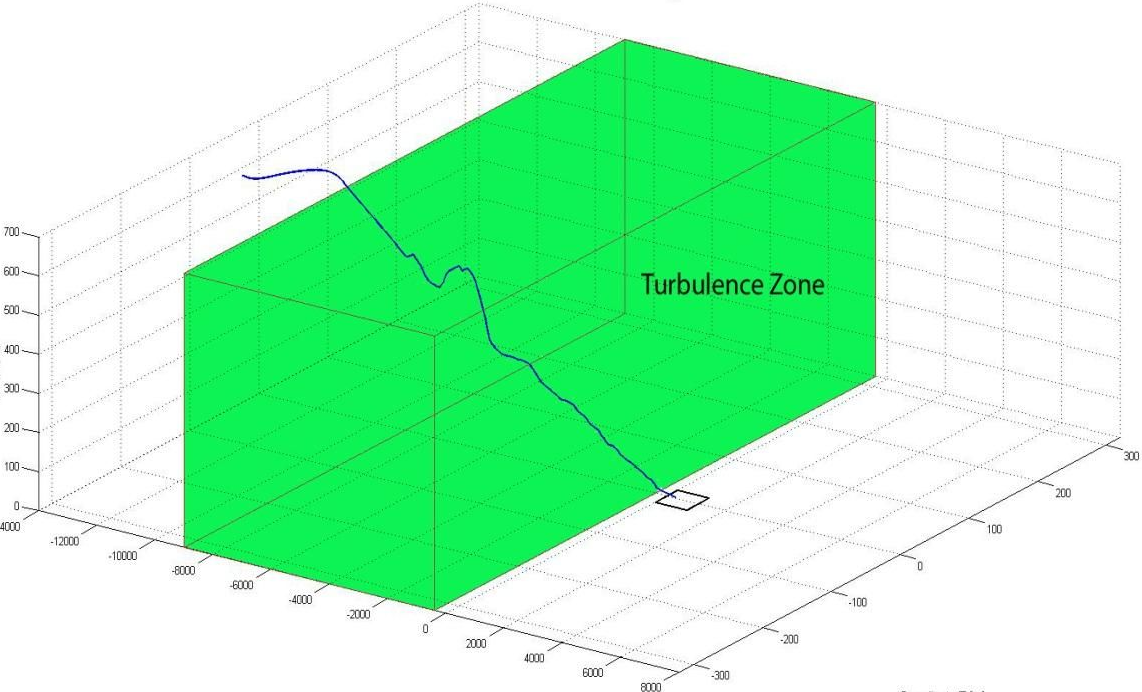 Здесь показан пример посадочной траектории, проходящей через зону турбулентности с интенсивностью 7 м/с. Из-за ветра, воздушное судно отклонилось от номинальной траектории. В контуре управления посадочного автопилота, траектория была выровнена.
Здесь показан пример посадочной траектории, проходящей через зону турбулентности с интенсивностью 7 м/с. Из-за ветра, воздушное судно отклонилось от номинальной траектории. В контуре управления посадочного автопилота, траектория была выровнена.
Конструкция и компоненты
Все аппаратное обеспечение посадочного автопилота «DinaPrim 2700» построено на COTS компонентах. Это означает, что используются известные на рынке устройства со стандартными интерфейсами, взаимозаменяемые по основным параметрам. Данный подход позволяет не расходовать время и ресурсы на разработку составных устройств, которые являются основным продуктом у специализированных поставщиков и которые предоставляют лучшие в своем классе компоненты по низкой стоимости.
В случае необходимости, COTS компоненты могут быть разработаны самостоятельно по собственной документации.
В качестве видеокамеры используется HD камера видимого и инфракрасного диапазона (Vis/IR). Камера формирует цветное изображение и расположена на стабилизированном подвесе в нижней части БПЛА. При наличии на БПЛА установленной камеры с схожими параметрами, она может использоваться в качестве сенсора. Угол обзора составляет 30°. Изображение с камеры может транслироваться на землю оператору БПЛА.
Стабилизированный карданный подвес камеры управляется от процессора и обеспечивает постоянные углы наклона по отношению к объектам на земной поверхности, независимо от углов наклона БПЛА. Такая стабилизированная платформа сокращает вычислительный объем обработки изображений и обеспечивает высокое качество картинки. В качестве датчиков положения камеры и БПЛА используются клинометр и 3D гироскопы.
 Вычислительный блок, содержащий CPU и DSP, построен на встраиваемом компьютерном модуле, и размещен в защитном корпусе. CPU работает под управлением ОС Embedded Linux, в DSP используется операционная система реального времени. Снаружи блока установлены соединители для подключения источников питания, камеры и ряда сенсоров, а также интерфейс ARINC/ASCB для передачи данных на собственный автопилот БПЛА и интерфейс сервоприводов для исполнения исполнительной механикой.
Вычислительный блок, содержащий CPU и DSP, построен на встраиваемом компьютерном модуле, и размещен в защитном корпусе. CPU работает под управлением ОС Embedded Linux, в DSP используется операционная система реального времени. Снаружи блока установлены соединители для подключения источников питания, камеры и ряда сенсоров, а также интерфейс ARINC/ASCB для передачи данных на собственный автопилот БПЛА и интерфейс сервоприводов для исполнения исполнительной механикой.
На блоке также расположены ниппели для подключения датчиков скорости и давления — трубок Пито.
В качестве датчиков высоты используются промышленно изготавливаемые сенсоры. Применяются два вида сенсоров — ультразвуковые и лазерные. Лазерый дальномер используется на больших расстояниях — до 50м от БПЛА до ВПП, соответственно он имеет точность ниже чем ультразвуковой, и ниже частота обновления данных: 32 раза в секунду. Ультразвуковой дальномер работает в диапазоне 20см — 7,65м и обеспечивает более высокую точность, которая становится критичной при приближении к ВПП. Частота обновления данных для ультразвукового дальномера — 40 Гц.
Данные сенсоры выпускаются специально для беспилотной авиации, с соответствующими условиями эксплуатации.
Совместное использование сенсоров разных типов имеет еще одно преимущество: повышение надежности системы в критический момент посадки.
В качестве 3D акселерометров, гироскопов и магнетометров используются современные твердотельные устройства. Для данных устройств используется совмещенная плата инерциальной навигации. На плате также размещаются контроллеры данных устройств, что позволяет преобразовать сигналы сенсоров для передачи по стандартному интерфейсу.